Rotor Fault Detection, Isolation, and Recovery
Problem#
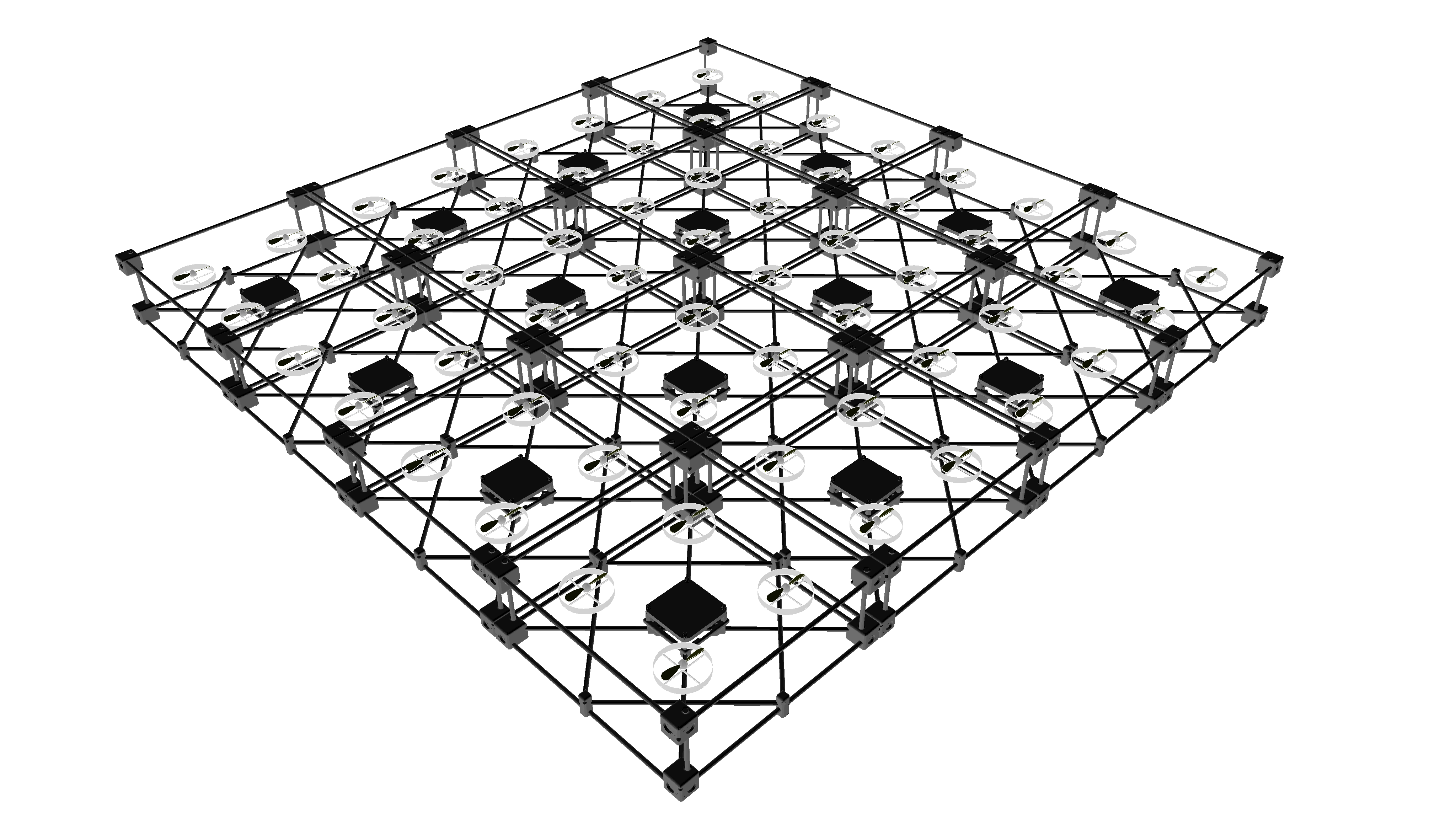
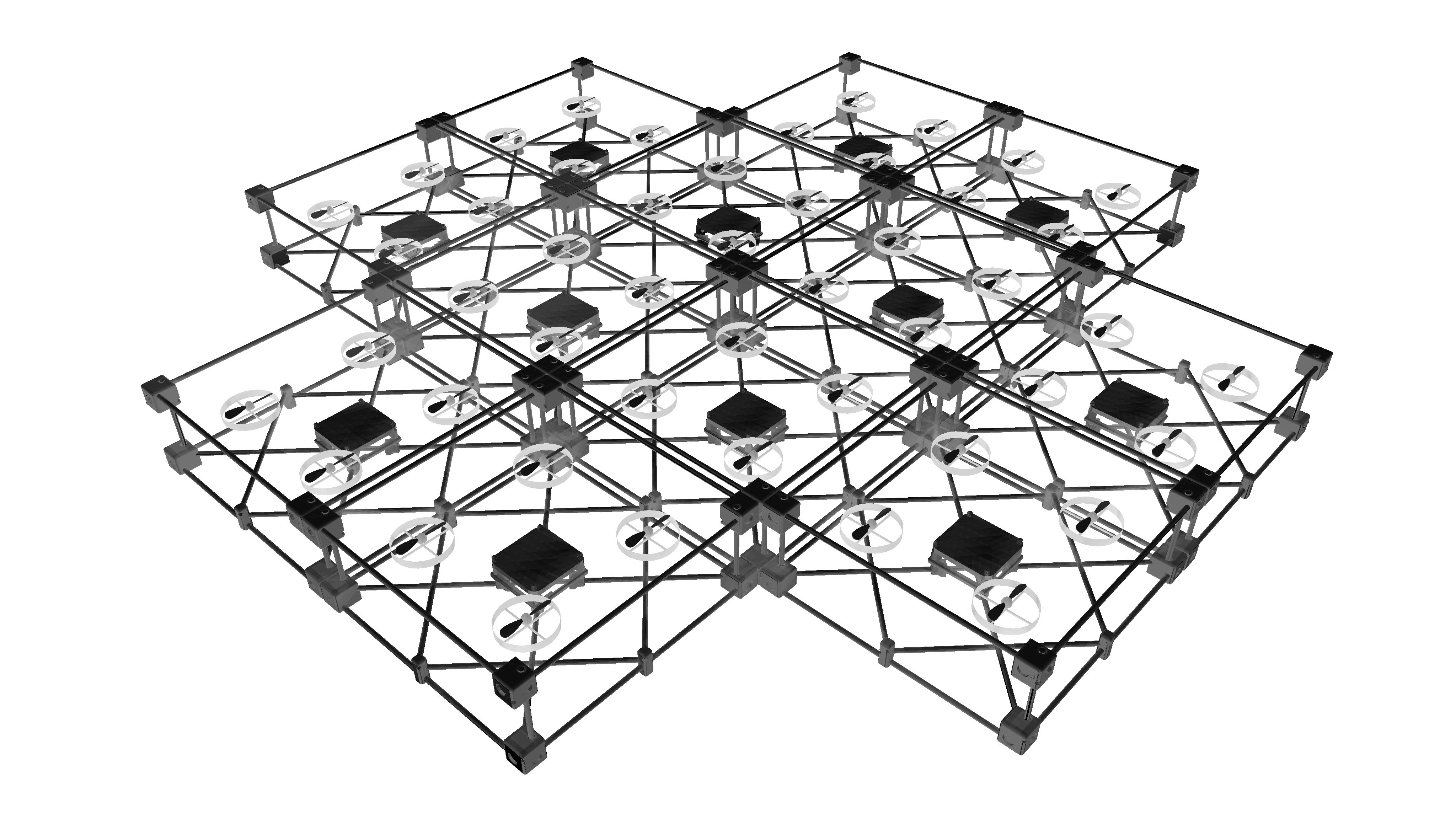
As robotic systems have progressed, one area that has been of growing interest is distributed robotics, including modular robots. A modular robot is a single large entity that is composed of many individual robots. For instance, ModQuad is a system in which individual quadrotors are enmeshed in carbon fiber frames that can magnetically attach to one another to form larger structures, as illustrated in the images below. One of the advantages of such a system is that there is significant redundancy in actuation. However, this also complicates dealing with faulty actuators, because a larger number of actuators makes it more difficult to pinpoint faulty rotors when they do occur.
The goal of this project is to develop techniques to find faulty rotors in modular aerial systems and mitigate their impact on the motion of the system as a whole once found.
Approach#
The work on detection and isolation is ongoing, but we have published a paper on how a modular robot can self-reconfigure once the fault is known.
Publications#
- Self‑Reconfiguration in Response to Faults in Modular Aerial Systems N. Gandhi, D. Saldaña, V. Kumar, L.T.X. Phan. ICRA & Robotics and Automation Letters, 2020.
- Vision‑Based Self‑Assembly for Modular Multirotor Structures (Multi‑Robot Systems Best Paper Finalist) Y. Litman, N. Gandhi, L.T.X. Phan, D. Saldaña. ICRA & Robotics and Automation Letters, 2021.