NASA Robotic Mining Competition
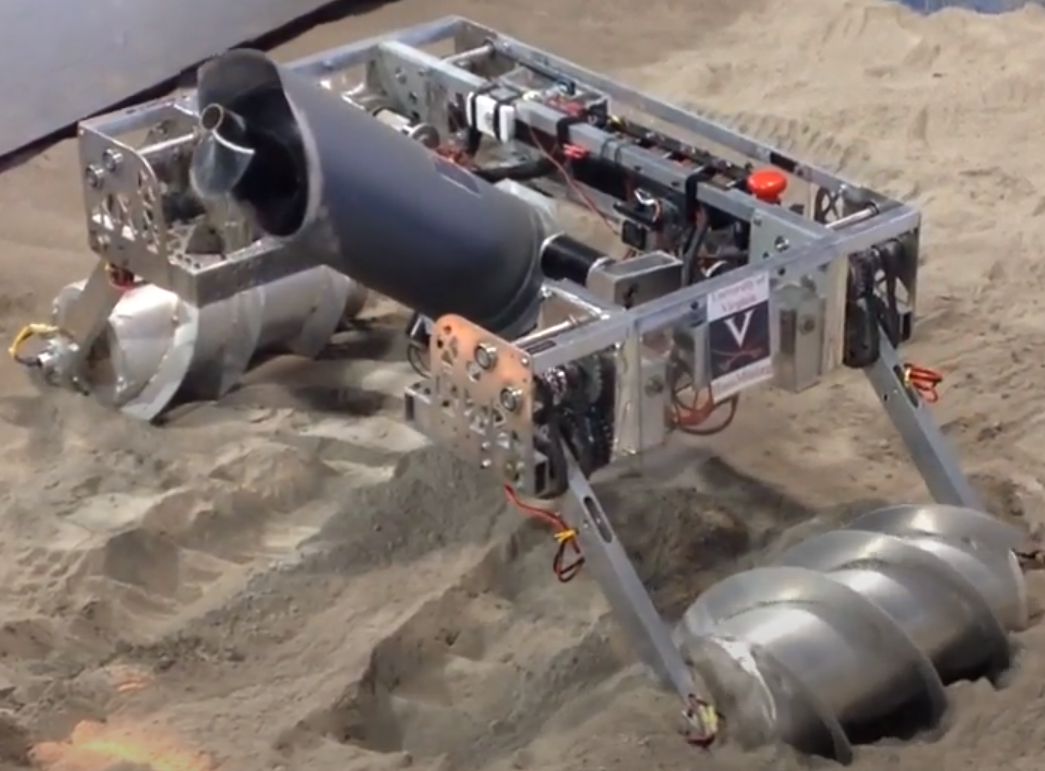
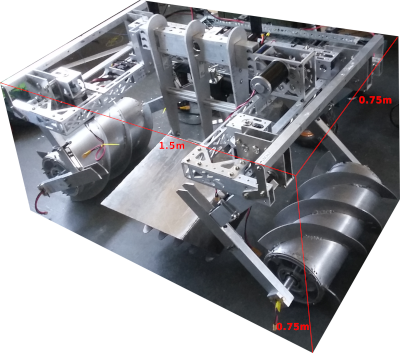
In my first year as an undergraduate student at the University of Virginia, I founded a team to compete in the NASA Robotic Mining Competition. The goal of this competition was to have student teams design and build robots that could mine on the moon or Mars to collect regolith (i.e., soil). Ice particles dispersed throughout the regolith would then be extracted from this soil to, for instance, provide water for humans, or perhaps even to generate rocket fuel.
I led the efforts to get fundraising for the project for each of the four years I ran the team, and led the efforts to design and build a functional robot over the course of each year. In 2016, we received an Honorable Mention for Innovation in recognition of our auger-based mining system and screw-propulsion system. In 2017, in one 10-minute run we collected 11.4kg of material and had moved from the bottom of the rankings from four years prior to the halfway mark.